热点资讯
其他资讯
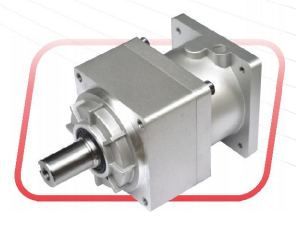
吉林零售机电轮轴式DML042-L2-40-8-30-46轻载伺服减速箱
文章来源:ymcdkj
发布时间:2024-04-17 16:06:45
30-46轻载伺服减速箱
QC2-W球杆仪:测量各轴间的垂直度;并机床电器误差与机械误差方向性断。RX1转台(可选):测量并回转工作台的转角精度的测量与补偿。电子水平仪等:测量机床滚摆等参数。间误差修正软件Fanuc三维空间补偿对应的修正软件是RVC-Fanuc,Siemens对应的修正软件是RVC-Siemens。RVC软件具备如下三大功能,每一功能能够为被测机床完成不同项目的补偿:普通线性误差补偿、三维空间误差补偿(线性位移、直线度、角度)和三轴间垂直度误差补偿。控系统及对应的空间补偿功能选择附件Fanuc3DCompensation功能和SiemensVCS功能。其中84Dsl1.3或更新版本,需要加载正确的ELF文件;雷尼绍发的RVC-Siemens适用于VCSplus、VCSA3和VCSA5。进行补偿功能要采取如下几个步骤:在机器工作空间范围中采集测量数据,评估偏差参数并将它们保存为数据文件;将文件拷入数控系统子目录Manufact.Cycles(CMA)中;采用GUD-变量补偿;系统实时计算补偿结果并根据三根几何轴线的实际MCS位置将其写入位置偏置。空间补偿前对机床基础状况的要求在进行空间误差补偿前用球杆仪对机床综合精度状况进行评估,若机床存在较大的反向跃冲、伺服不匹配等电器误差,则即使进行空间误差补偿,也对该机床精度改善不大。在进行空间误差补偿前将机床电器误差调整为次要精度问题尤为必要(对机床综合精度状况评估参见QC2-W球杆仪使用说明)。重复精度不好的机床即使进行空间误差补偿,补偿效果也不明显。对于精度要求高达5m左右的数控机床,建议对其使用环境应该按三坐标测量机的使用环境来要求,否则从长远来看机床自身因环境变化而带来的精度变化将会在某种程度上削弱空间误差补偿的效果。
吉 0-46轻载伺服减速箱
解决措施:提高齿轮的强度,齿轮的精度,降低齿轮和轴的粗糙度数值。提高从动齿轮与轴的精度紧固性, 主要是精密行星减速机齿轮达到合理的过盈配合。
吉 0-46轻载伺服减速箱
。同时记住以下内容: (1)在等速转动时,电动机的转矩必须和阻转矩相平衡。 (2)当负载转矩增大时, 初瞬间电动机的转矩T
(3)一般三相异步电动机的过载系数是1.8-2.2 . (4)电动机刚启动时n=0,s=1.
5. 三相异步电动机的起动 (1)直接起动 启动时转差率为1,转子中感应电动势很大,转子电流也很大。
当电动机在额定电压下启动时,称为直接启动,直接启动的电流约为额定电流的5-7倍。
一般来说,额定功率为7.5kw以下的小容量异步电动机可直接起动。 直接起动控制线路所用电器包括组合关、按钮、交流接触器中间继电器、热继电器及熔断器。
掌握它们各自的特点,同时掌握熔断器熔丝额定电流的计算。 直接起动控制电路:掌握其控制原理。
(2)鼠笼式异步电动机的降压起动。 掌握星型-角型起动和自耦变压器降压起动的工作原理
(3)绕线式三相异步电动机的起动 一般
了解。
行星减速机以其体积小,传动效率高,减速范围宽,精度高,而被广泛应用于伺服、步进、直流等传动系统中。在保证精密传动的前提下,主要被用来降低转速增大扭矩和降低负载/电机的转动惯量比。
衡量行减速机性能的几个关键技术参数是:减速比,平均寿命,额定输出扭矩,回程间隙,满载效率,噪音,横向/径向受力和工作温度。
输出转速与输入转速的比值。
级数:太阳轮及其周围的行星轮构成独立的减速轮系,如减速机内只此一个轮系,我们称为“ ”。为得到较大减速比,需多级传动,
平均寿命: 指减速机在额定负载下,输入转速时的连续工作时间。
额定输出扭矩: 指在额定负载下长期工作时允许输出扭矩。输出扭矩是该值的两倍。 回程间隙: 将输出端固定,输入端顺时针和逆时针方向旋转,使输出端产生额定扭矩的±2%扭矩时,减速机输入端有一个微小的角位移,此角位移即为回程间隙。单位是“弧分”。
润滑方式:行星减速机在整个使用期间无需润滑。 满载效率: 指在负载情况下,减速机的传输效率。它是衡量减速机的一关键指标, 满载效率高的减速机发热少,整体性能好。
噪音:单位是分贝(dB)A。此数值是在输入转速为3000转/分钟时,不带负载,距离减速机一米距离时测量的。
30-46轻载伺服减速箱
-S3-19HB19 V 3-28HA22
S3-19DB19
S3-28HB22
VRB-115 -28HA28
-S3-28HA28 -S3-28HB24 V 3-28HA24
S3-19EC16